Driving the Robot (Odometry)
02_wheel_odom.ipynb
- Running the cell codeCtrl + Enter
import rospy
import json
from std_msgs.msg import UInt8MultiArray, String
from nav_msgs.msg import Odometry
import time
import math
import threading
Import python modules
rospy.init_node('zetabot')
move_pub = rospy.Publisher('/robot_command', String, queue_size=1)
Create zetabot Node
Create robot_command Topic Publisher
is_robot_move = False
Set the is_robot_move variable to False
def moveTo():
tmp = {"MoveDelta": 0.5}
msg = json.dumps(tmp)
rospy.loginfo("Sent: %s", msg)
move_pub.publish(msg)
Create a moveTo() function
Convert {“MoveDelta”: -0.5} to Json String
Publish the converted message
def process_odom(data):
if is_robot_move == True:
x = data.pose.pose.position.x
y = data.pose.pose.positioan.y
z = data.pose.pose.orientation.z
w = data.pose.pose.orientation.w
print("current_odom\nx: {}\ny: {}\nz: {}\nw: {}\n".format(x,y,z,w))
rospy.sleep(0.5)
Create process_odom(data) function
If is_robot_move variable is True, output x, y, z, w values of odom Topic
def process_serial_input(data):
global is_robot_move
if len(data.data) != 0:
is_robot_move = True
rospy.sleep(0.1)
is_robot_move = False
Create process_serial_input(data) function
If the length of motor_driver_serial_input Topic is not 0, set is_robot_move variable to True
Set the is_robot_move variable to False after a 0.1 second time delay
def subs():
rospy.Subscriber("motor_driver_serial_input", UInt8MultiArray, process_serial_input, queue_size=1)
rospy.Subscriber("odom", Odometry, process_odom, queue_size=1)
rospy.spin()
Create subs function
Create motor_driver_serial_input Topic Subscriber
Create an odom Topic Subscriber
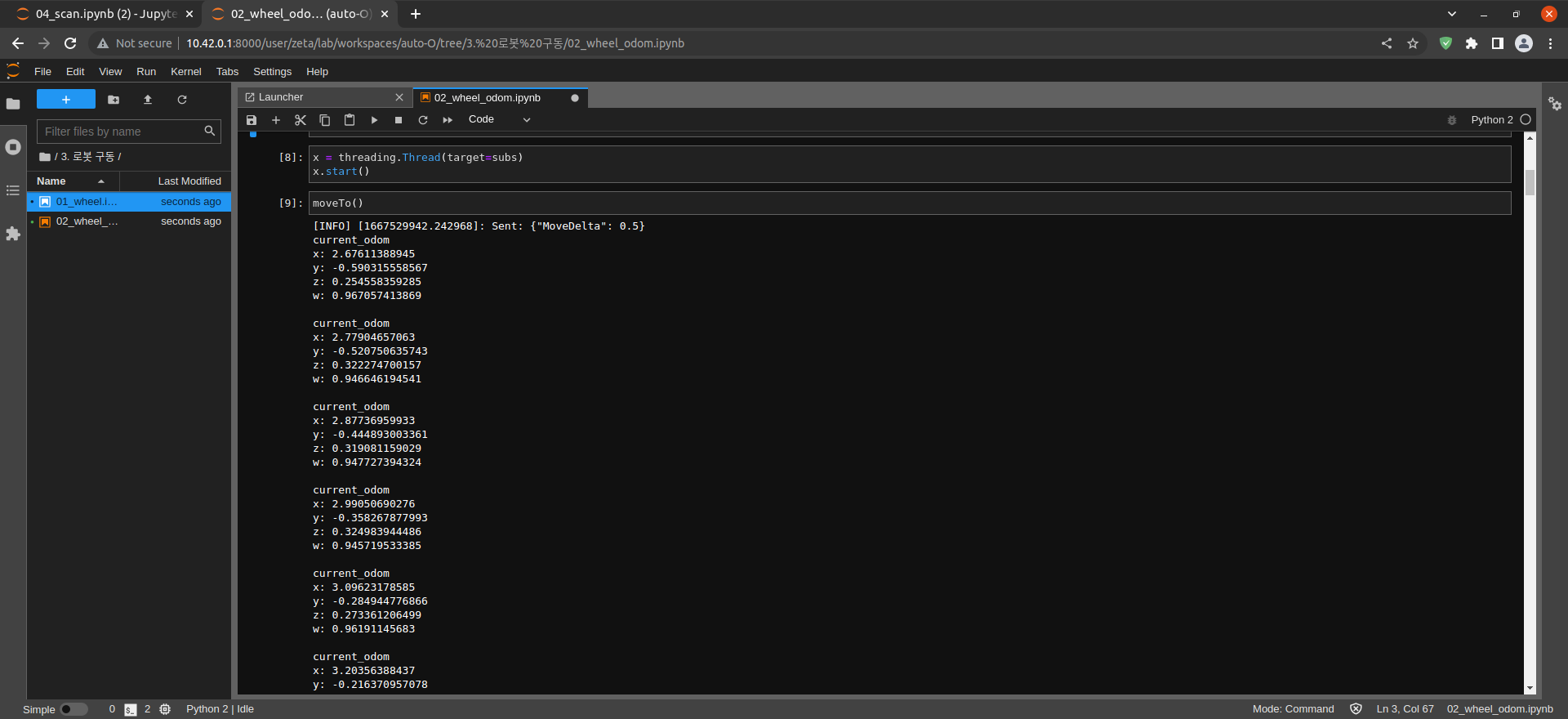
x = threading.Thread(target=subs)
x.start()
Assign the subs() function to Thread
Thread execution
moveTo()
Run the moveTo() function