Speaker
01_sound.ipynb
- Running the cell codeCtrl + Enter
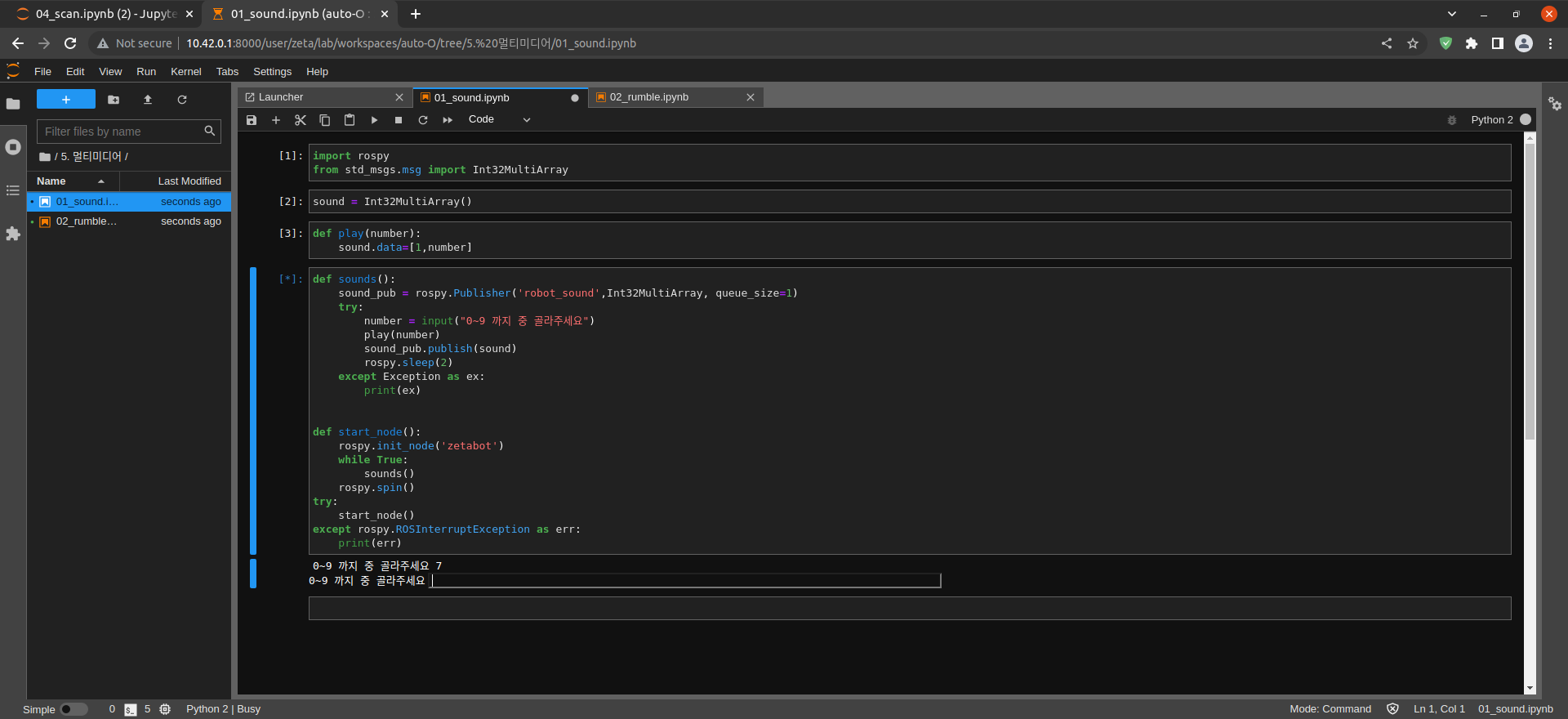
import rospy
from std_msgs.msg import Int32MultiArray
Import the rospy module
Import Int32MultiArray from std_msgs.msg module
sound = Int32MultiArray()
Set sound variable as Int32MultiArray() Message Type
def play(number):
sound.data=[1,number]
Create play(number) function
Specify the data of the sound message in [1,number] format
def sounds():
sound_pub = rospy.Publisher('robot_sound',Int32MultiArray, queue_size=1)
try:
number = input("0~9 까지 중 골라주세요")
play(number)
sound_pub.publish(sound)
rospy.sleep(2)
except Exception as ex:
print(ex)
def start_node():
rospy.init_node('zetabot')
while True:
sounds()
rospy.spin()
try:
start_node()
except rospy.ROSInterruptException as err:
print(err)
Create the sounds() function
Create robot_sound Topic Publisher
Get user input into number variable
Execute the play(number) function
sound Message Publish
2 second time delay and exception handling
Create start_node() function
Create zetabot Node
runs the sounds() function
start_node() function execution and exception handling