ROS Topic Subscriber
01_02_ros_topic_subscriber.ipynb
- Running the cell codeCtrl + Enter
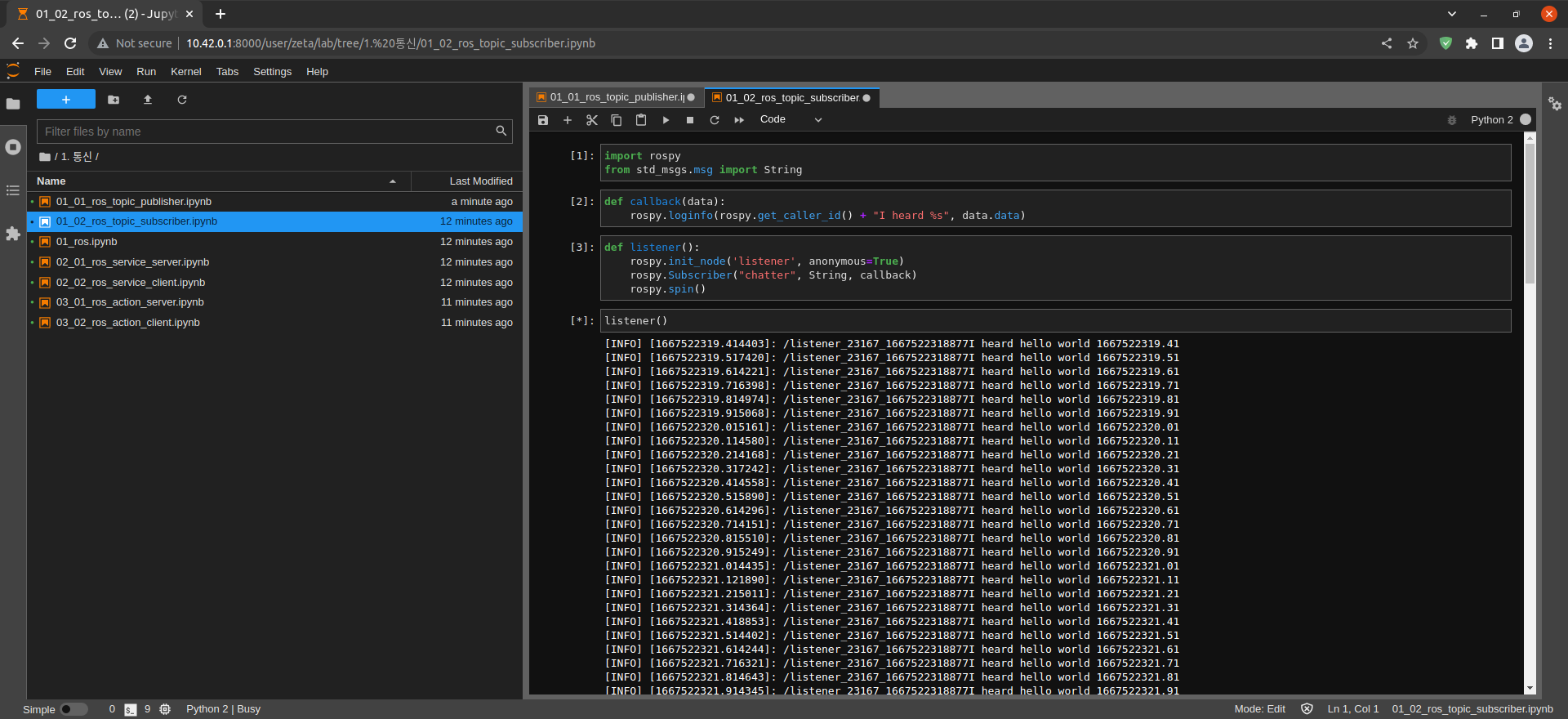
import rospy
from std_msgs.msg import String
Import rospy modules
Import String from std_msgs.msg module
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
Create callback() function
Node id and message data output
def listener():
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
rospy.spin()
Create listener function
Create listener Node
Subscribe to Chatter Topic Message
Handle Subscriber Callback
listener()
Run the listener function